Chi ZhangI am currently a PhD student at the ATARI Lab at the Technical University of Munich. My research focuses on enhancing the capabilities of concurrent robotic systems by combining optimal control and learning-based methods. I will be working with hardware platforms, including Unitree Go2, Aliengo, and G1. I obtained my master's degree in Mechatronics and Robotics (MuR) from the School of Engineering and Design at the Technical University of Munich. I earned my bachelor's degree in Mechanical Engineering in 2019 from the Department of Mechanical Engineering at the China University of Mining and Technology. I completed my master's thesis in 2023 at the Robotics Innovation Center (RIC) at the German Research Center for Artificial Intelligence (DFKI) under the supervision of Felix Wiebe, Akhil Sathuluri, Prof. Dr. Shivesh Kumar, Prof. Dr. Frank Kirchner, and Prof. Dr. Markus Zimmermann. In 2022, I worked as a research assistant in the Robot Systems Group at the Laboratory for Product Development and Lightweight Design (LPL) at the School of Engineering and Design of the Technical University of Munich. |

|
Projects
|
Reinforcement learning based control of an underactuated double pendulum systemChi Zhang Advisor: Felix Wiebe, Akhil Sathuluri, Prof. Dr. Shivesh Kumar, Prof. Dr. Frank Kirchner, Prof. Dr. Markus Zimmermann Master Thesis, Robotics Innovation Center, DFKI GmbH, 2023 preprint / code / poster / In this project, reinforcement learning-based control was attempted on an underactuated double pendulum system to perform the tasks of swinging up and stabilization. Depending on the joint being controlled, the systems are referred to as the ‘pendubot’ and the ‘acrobot.’ A combined controller consisting of an RL agent trained with the Soft Actor-Critic (SAC) algorithm for the swing-up task and a Linear Quadratic Regulator (LQR) for stabilization is employed. A 3-stage reward function was designed to guide the agent into the Region of Attraction (RoA) of the LQR controller, where the system achieves asymptotic stability toward the goal state and maintains stability over an extended duration. |
|
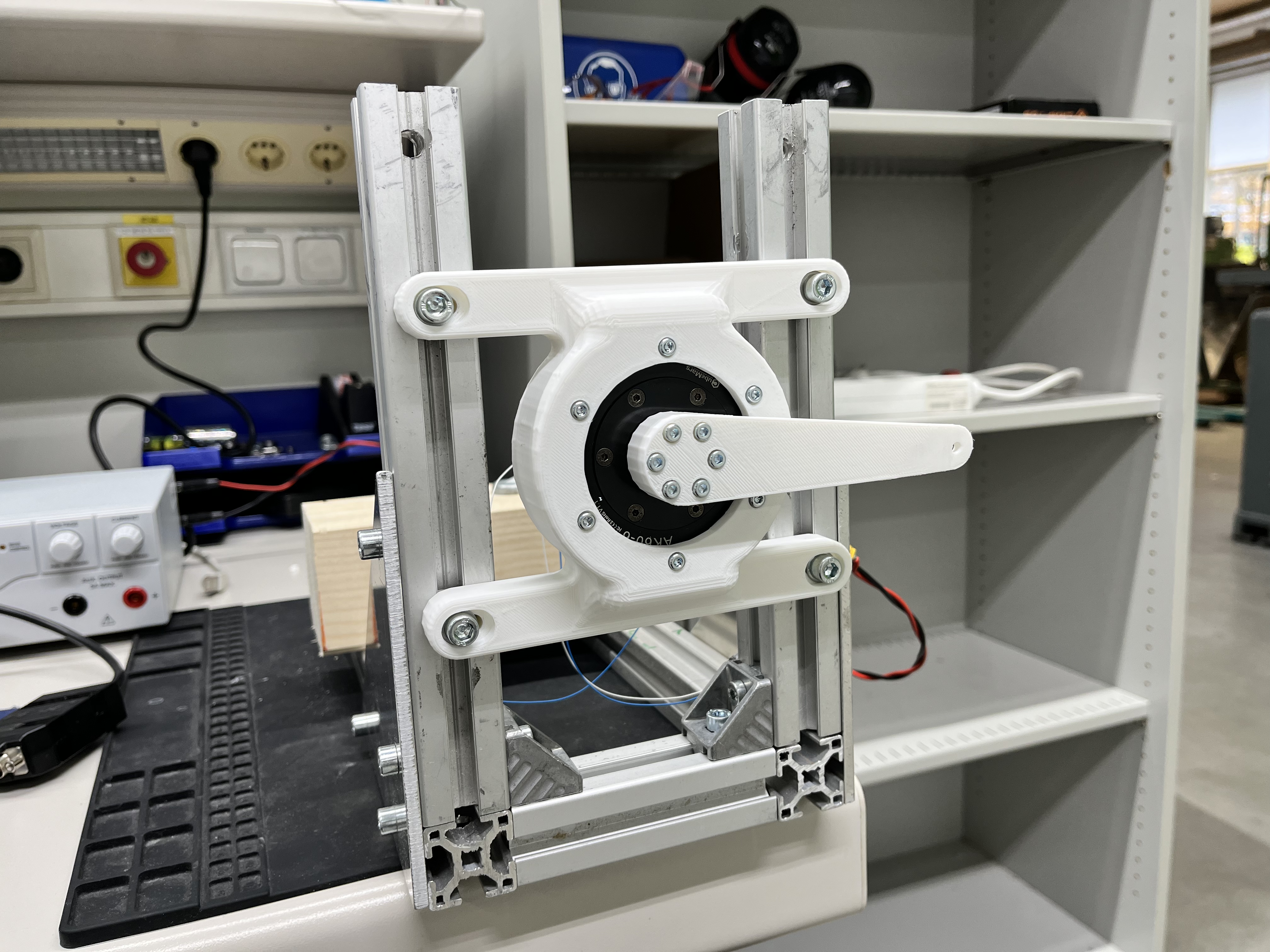
Tmotor AK-series motor driver based on CAN and LinuxChi Zhang Advisor: Akhil Sathuluri Research Assistant, 2022 code / In this project, a software driver for Tmotor AK-series motors is designed based on the CAN protocol and a Linux environment. The AK-series motors are lightweight, quasi-direct electric motors with an inbuilt MIT Mini-Cheetah controller, making them suitable for modern robotics applications such as exoskeletons, quadrupeds, and humanoids. |
|
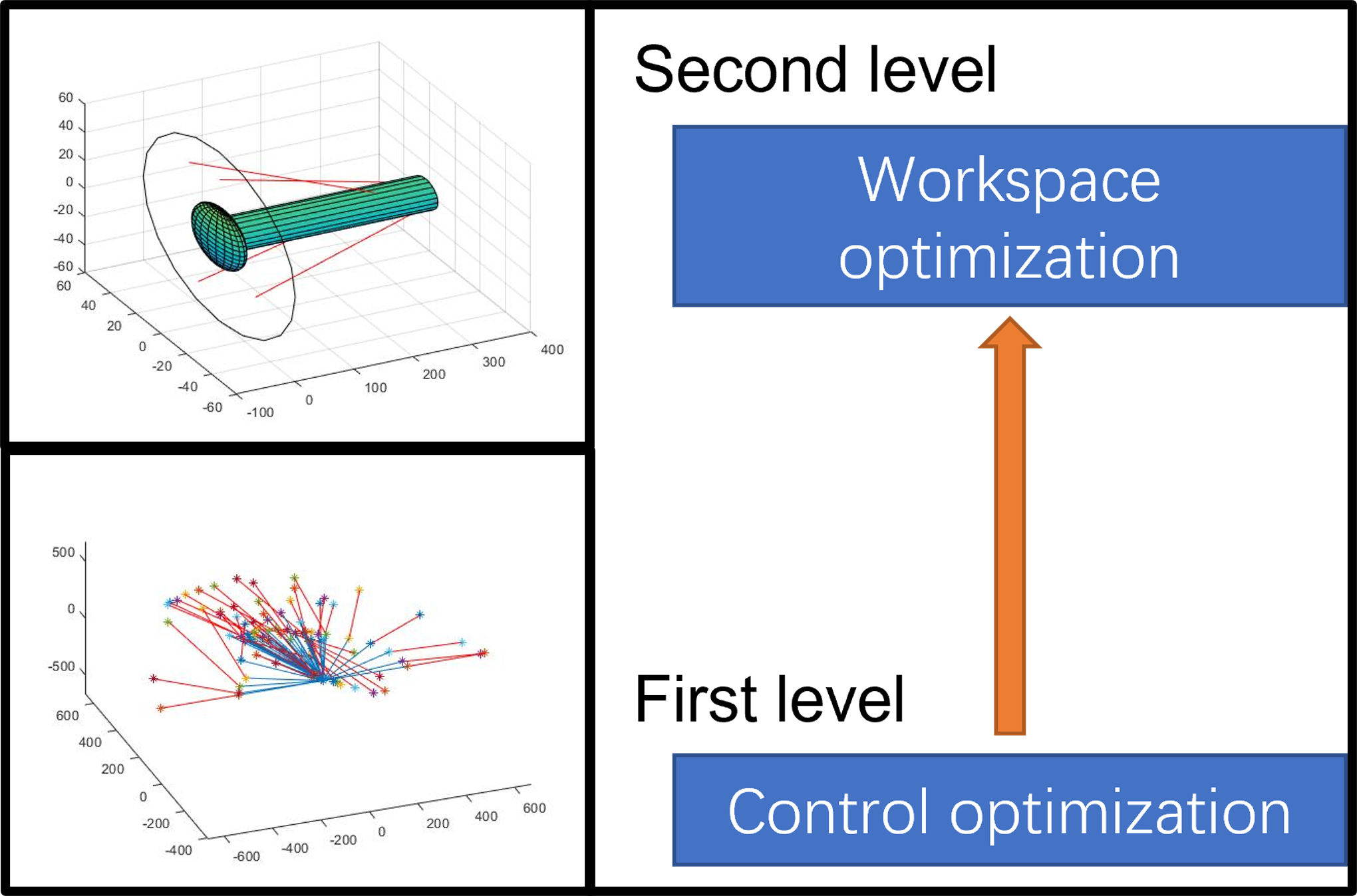
Numerical Co-optimization for Robot Design and ControlChi Zhang Advisor: Akhil Sathuluri Grade 2.0, Practical Course, 2022 code / In this project, two topics of optimization in the field of robotics have been discussed, being workspace optimization and control optimization. |

|
Tour into the pictureChi Zhang, Xuedong Zhang, Wenxin Tang, Zhengxuan Yuan, Siyao Wang Advisor: Dr. rer. nat. Martin Kleinsteuber Grade 1.3, Lecture Project, 2022 code / In this project, we provide an interactive application, which enables the user to generate animations from a single 2D image. This application provides users with the following functions in the form of GUI: select an image, select the foreground object, select the vanishing point and inner rectangle, as well as change the perspective. |
|
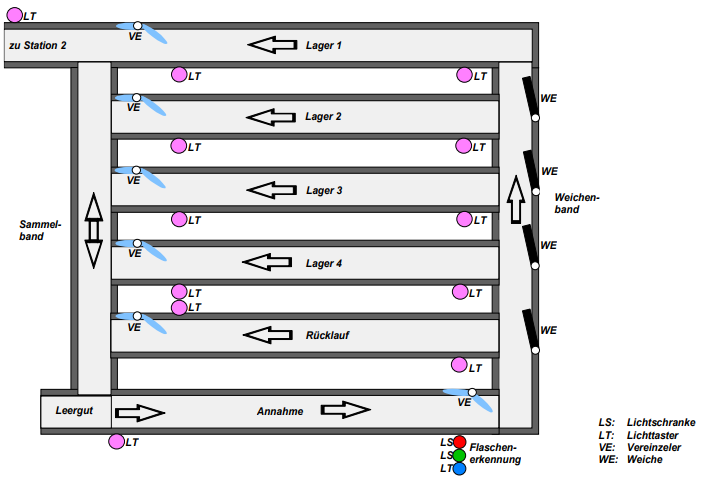
Simulation of an autonomous system for medicine production based on Siemens PLCChi Zhang, Ye Su, Haoran Sun Advisor: Prof. Dr.-Ing. Birgit Vogel-Heuser Grade 1.3, Practical Course, 2022 code / In this project, our team set up a simulation to automate the material transfer process in the vaccine production chain. |